I. Systemöversikt
1. Projektbakgrund
Under senare år har illegal transport av godsfordon på motorvägar blivit ett allvarligt problem som äventyrar den nationella trafiksäkerheten. Det överbelastar motorvägar och broar, vilket kraftigt minskar vägarnas och broarnas livslängd; samtidigt minskar fordonens säkerhetsfaktor kraftigt, vilket ständigt orsakar trafikolyckor; det är också lätt att orsaka trafikstockningar och miljöföroreningar.
Regeringar på alla nivåer över hela landet har kontinuerligt ökat sina ansträngningar för att kontrollera överbelastade transporter av motorvägsfordon och har uppnått viktiga resultat i etapper. På grund av komplexa sociala och ekonomiska faktorer är dock den nationella situationen för överbelastningsdetektering fortfarande mycket allvarlig, och de dolda farorna med återhämtning har inte eliminerats. Att konsolidera resultaten av styrningen och kontinuerligt främja arbetet med överbelastningsdetektering är fortfarande under stor press. Därför är styrningen av överbelastade fordonstransporter ett långsiktigt och dagligt arbete som måste fortsätta. Det är avgörande att integrera styrningen av överbelastat arbete i en långsiktig mekanism. Den spelar också en rättslig avskräckande roll för överbelastade fordon och kan också utöka sina funktioner till att omfatta väginspektioner, slå ner på den tillfälliga mentaliteten kring olagliga transporter och i tid kontrollera och eliminera olika olagliga transporter, inklusive överbelastade transporter.
2. Introduktion till vågsystemet
Principen för en statisk lastbilsvåg är att parkera alla fordon på vågplattformen för att väga hela fordonet. Den har hög vägningsnoggrannhet och tydliga nationella standarder. En konventionell lastbilsvåg kan dock bara mäta hela fordonets vikt, inte axeltrycket. Den kan bedöma om hela fordonet är överbelastat, men inte om axeltrycket är överbelastat. Den kan inte uppfylla vägförvaltningens krav för att hantera överbelastade transporter.
Denna plan kombinerar vårt företags mångåriga erfarenhet av att designa och tillverka utrustning för överbelastningsdetektering och dess faktiska tillämpning i olika regioner i landet, studerar noggrant användningen av olika typer av överbelastningsdetekteringsutrustning på marknaden och beaktar på ett omfattande sätt de specifika behoven hos vägförvaltningsavdelningar för hantering av överbelastade transporter. Den använder avancerad teknik och unika designidéer för att utveckla ett dynamiskt högprecisionssystem för fordonsvikt och axeltypdetektering. Det kan väga både axelvikt och totalvikt och kan urskilja axeltyp. Axelviktens noggrannhet kan också förbättras avsevärt.
2. Sammansättning av överbelastnings- och övergränssystem
1. Systemfunktioner
Den kan väga fordon som passerar i låg hastighet och automatiskt avgöra om fordonets vikt eller axelvikt är överbelastad;
Den kan detektera antalet axlar, axelgrupp, axelvikt och fordonets fordonsvikt;
Den kan bilda fullständig information om fordonsvägning, inklusive axeltyp, axelvikt, axelgrupp och totalvikt;
Den kan överföra vägningsinformation till datorn via datagränssnittet;
Kärndelen av systemet använder mogen och pålitlig utrustning, som alla använder modulär design, är lätt att underhålla och utöka, vilket säkerställer systemets höga tillförlitlighet.
Systemprogramvaran är mogen, mycket tillförlitlig, informationen är komplett och effektiv, och den kan delas fullt ut, vilket effektivt förbättrar arbetseffektiviteten och eliminerar olika kryphål i hanteringen i största möjliga utsträckning.
2. Systemprocess
Lastbilen förs in i överlaststationens vägningsfil och registreringsskyltens system identifierar registreringsskyltens nummer;
Däckets (axelns) identifierare särskiljer antalet axlar, och fordonets vägningssystem börjar väga, bestämma axelgruppen och beräkna axeltrycket.
När alla fordon passerar genom fordonsseparatorn och kommer in på vågplattformen, och vågen är i ett relativt balanserat tillstånd, registreras fordonets totalvikt och axeltrycket erhålls.
Vågsystemet skickar vägningsinformation (registreringsskyltnummer, antal axlar, axelvikt, total fordonsvikt etc.) till detekteringsdatorn. Datorn avgör om den är överbegränsad och visar detekteringsinformationen, såsom fordonsvikt, övergräns och övergränsmängd, på skärmen.
Efter att fordonet har slutfört relevanta operationer släpper fordonsguidens personal de fordon som inte är överbegränsade för att lämna detekteringsområdet enligt informationen på skärmen, vägleder de överbegränsade fordonen till stationsområdet för bearbetning, skriver ut inspektionsblanketten för överbegränsade fordon och utför relevanta laddningsoperationer.
3. Systemsammansättning och layoutplan
3.1 Systemsammansättning
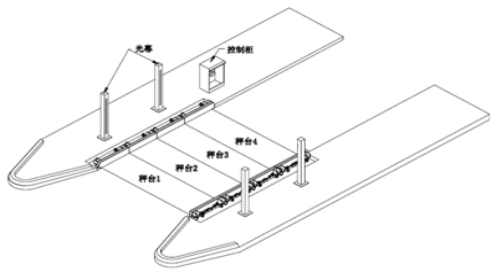
Övergräns- och överbelastningssystemet består av ZDG:s dynamiska axelvåg med fyra bord, styrinstrument, infraröd fordonsseparator, vågplattformens hjulaxelidentifierare, styrskåp (tillvalsutrustning: registreringsskyltsigenkänningssystem, LED-storskärmssystem, röstmeddelandesystem, fordonsstyrningssystem, industridator, biljettskrivare, avbrottsfri UPS, programvara för övergräns- och överbelastningsdetektering, övervakningssystem) och andra tillbehör och kablar.
3.2 Systemlayoutdiagram som visas:
Arbetsflöde:
1) Fordon kör in i körfältet i ordningsföljd medan de håller ett säkert avstånd, vilket utlöser den infraröda fordonsseparatorn;
2) Varje axel på fordonet passerar genom den flersidiga vägningsplattformen;
3) Displaystyrenheten bearbetar vägningssignalen som erhålls från vågplattformens sensor och hjulsensorsignalen, separerar axeln enligt de logiska villkoren och hanterar effektivt speciella situationer;
4) Fordonets bakdel lämnar vågplattformen för flera ytor och den infraröda fordonsseparatorn;
5) Displaystyrenheten bedömer fordonets slutsignal på ett omfattande sätt baserat på ocklusionssignalen som detekteras av den infraröda fordonsseparatorn och vägningssignalen som erhålls av vägningssensorn;
6) Displayens styrenhet bearbetar vägningssignalen som erhålls när ovannämnda fordon passerar genom vägningsplattformen;
7) Displayens styrenhet visar en komplett vägningsinformation för hela fordonet, och den fullständiga vägningsinformationen inkluderar fordonshastighet, axeltyp, axelvikt, axelgruppsvikt, totalvikt etc.;
8) Slutför vägningen av ett fordon och vänta på vägningen av nästa fordon
9) Under hela arbetsprocessen hanterar systemet automatiskt olika specialsituationer, såsom fullständig in- och utkörning, upprepad in- och utkörning samt långvarig uppehållstid på vågplattformen;
Systemet kan automatiskt och effektivt hantera följande fordonssituation, och vägningen av följande fordon påverkar inte datanoggrannheten.

Publiceringstid: 20 februari 2025